產(chǎn)品中心
凱瑞科技提供給用戶切實可行的系統(tǒng)解決方案,讓您的散狀固體物料膠帶輸送更清潔更安全、更高效。
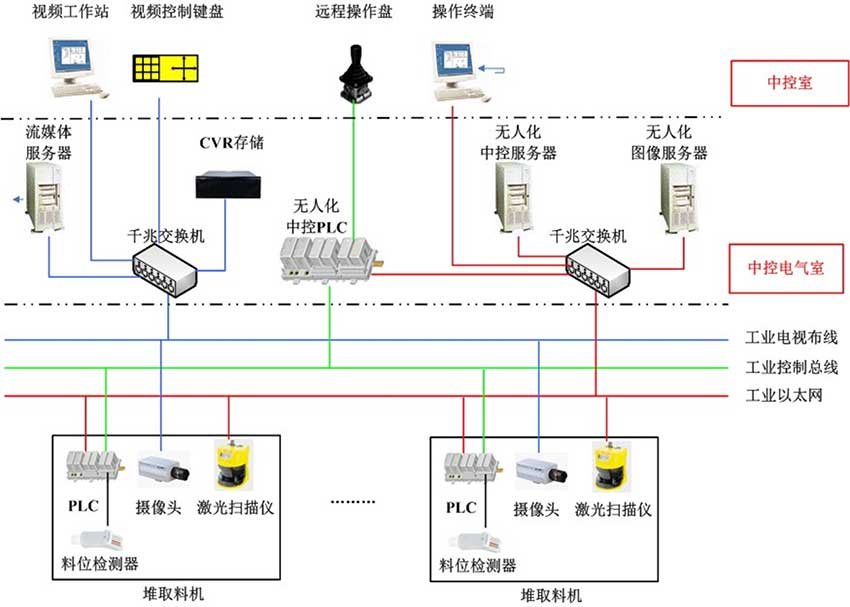
斗輪機自動化作業(yè)系統(tǒng)
發(fā)布時間:2019-02-02編輯:
煤場封閉以后帶來的粉塵、有害氣體、作業(yè)環(huán)境的惡化等一系列問題,也造成斗輪機司機工作環(huán)境的惡化。隨著工業(yè)自動化水平的提高和數(shù)據(jù)處理技術(shù)、監(jiān)測技術(shù)的長足進步,斗輪堆取料機已完全可以實現(xiàn)遠程全自動作業(yè)控制。斗輪機自動化作業(yè)控制系統(tǒng)利用自動控制、激光三維掃描、精確定位技術(shù)等手段,建立數(shù)字化的堆場信息,實現(xiàn)斗輪機的遠程全自動作業(yè)控制。斗輪機自動化作業(yè)控制系統(tǒng)能夠減少煤炭、礦石等散料的運轉(zhuǎn)時間,減少斗輪機的操作人員,降低勞動生產(chǎn)成本,提高斗輪機的安全經(jīng)濟運行效率,同時也為散料轉(zhuǎn)運料場的無人化、燃煤摻燒和混配礦智能化控制打下堅實的基礎(chǔ)。